

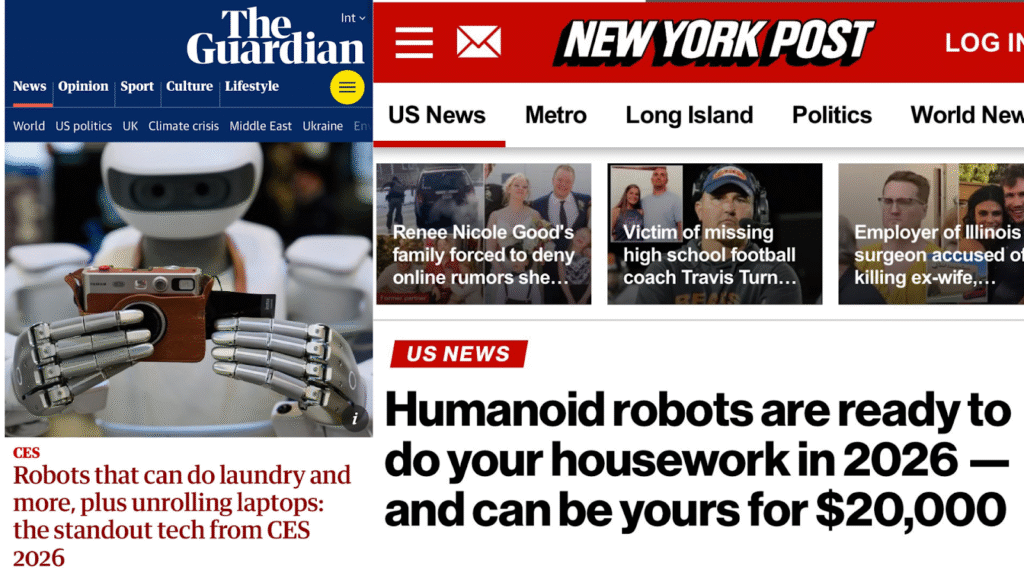
CES 2026 just wrapped up with a clear message: humanoid robots are coming to your home. The Guardian reported on robots that can do laundry and household tasks. The New York Post announced these robots will be available for $20,000 in 2026. While big tech companies race to build the hardware, something interesting is happening on Bittensor. Three subnets are already building the AI intelligence these robots will need.
Why Robotics Needs Better AI
Current AI can generate text and images well, but robots need something different. They need to make reliable decisions in the real world where mistakes have physical consequences. A chatbot hallucinating is annoying. A robot hallucinating while carrying your grandmother could be dangerous.
Robots need AI that can remember past actions, understand human emotions, follow safety rules, and explain why they made decisions. They need to work for hours or days without resetting. They need to understand when a human is distressed and respond appropriately. Most current AI wasn’t built for this.
That’s where these three Bittensor subnets come in. Each one is tackling a different challenge robots will face.
Loosh: Making Robots Understand Emotions and Make Safe Decisions
Loosh (Subnet 78) is focused on making machines that can make reliable, safe decisions rather than just generating plausible text. Current large language models are probabilistic, that is, they guess at likely responses but don’t have persistent memory or stable reasoning. Loosh builds something different.
They place AI models inside a structured cognitive architecture. Think of it as giving the AI a framework for thinking rather than letting it free-generate responses. This includes knowledge graphs that organize information, long-term memory that persists between interactions, working memory for the current context, and rule-based ethical reasoning that constrains what the AI can do.
The result is an agent that remembers past actions, evaluates consequences before acting, and can explain its decisions. Instead of resampling behavior from scratch every time, it learns from prior outcomes.
One of their first major achievements is emotional inference. They trained a model on EEG brain data that can predict human emotional states with 70% accuracy. Now they’re extending this to recognize emotions from audio and video, very crucial for robots that need to interact with humans naturally.
Why this matters: A care robot needs to detect when someone is distressed before deciding how to act. An autonomous system needs to refuse unsafe instructions. Enterprise robots need to explain their decisions for compliance and auditing. Loosh is building the foundation for all of this.
Kinitro: Coordinating Robot Actions and Planning
Kinitro tackles yet another piece: how robots plan and coordinate complex sequences of actions. For instance, doing laundry isn’t one task; it’s dozens of sub-tasks that need to happen in the right order.

The robot needs to locate dirty clothes, pick them up without damaging them, sort them by color and fabric type, load the washing machine, add detergent, select the right cycle, wait for completion, transfer to the dryer, fold the clean clothes, and put them away. Each step has prerequisites and consequences.
Kinitro is building AI that can break down complex tasks into manageable steps, coordinate multiple actions across time, adapt plans when something goes wrong, and optimize for efficiency while maintaining safety. This is the planning intelligence that turns a machine that can move into a robot that can accomplish useful work.
When a care robot needs to prepare a meal, clean a room, or help someone get dressed, Kinitro-style planning intelligence is what makes it possible.
Swarm: Coordinating Multiple Drones
Swarm takes a different approach entirely, focusing on coordinating multiple drones rather than single humanoid robots. The future of robotics isn’t just individual robots. It’s teams of robots working together.

Imagine a warehouse where dozens of drones need to navigate the same space without colliding, coordinate to move large objects together, optimize their routes to avoid congestion, and adapt when individual drones fail or need charging. Or an emergency response where multiple drones need to search an area efficiently by dividing it up intelligently.
Swarm is building the AI for this kind of multi-agent coordination. The challenges are different from single robots—you need distributed decision-making where no single controller manages everything, communication protocols so drones can share information, conflict resolution when goals compete, and emergent behavior where the group accomplishes things no individual drone could.
This subnet recognizes that robotics at scale requires solving coordination problems, not just making individual robots smarter.
Why Building on Bittensor Matters
For these three subnets, development costs are radically lower. Instead of raising millions from venture capitalists to hire teams and rent computing power, they tap into Bittensor’s decentralized network. Miners worldwide contribute computing power and get paid in TAO tokens based on the quality of their contributions. This means subnets can experiment and iterate without burning through investor money.
The coordination is decentralized. No single company controls the robotics AI stack. Loosh can handle emotions, Kinitro can handle planning, and Swarm can handle coordination; all working independently but potentially integrating since they’re on the same network.
There’s no dependence on public capital markets. Traditional robotics companies need to go public or get acquired to give investors returns. These subnets can keep building as long as they’re producing valuable AI, funded by the Bittensor network rather than quarterly earnings expectations.
As one community member noted, this creates “asymmetric opportunity”—the chance to invest in cutting-edge robotics AI at the infrastructure level before it becomes mainstream.
What This Means Practically
For robotics companies building hardware, these subnets offer AI capabilities without needing to develop everything in-house. Need emotional recognition? Use Loosh. Need task planning? Use Kinitro. Need drone coordination? Use Swarm.
For healthcare and eldercare, robots with Loosh-style emotional intelligence could detect distress and respond appropriately, making them actually useful for vulnerable populations rather than just novelty items.
For enterprises, robots with Kinitro-style planning could handle complex warehouse operations, manufacturing tasks, or facility maintenance with real reliability.
For the Bittensor ecosystem, robotics represents one of the clearest use cases for decentralized AI. It’s not abstract; it’s robots in homes and businesses making decisions that affect real people. Success here would validate the entire model.


Be the first to comment